目录
介绍SARSA、Q-Learning算法原理和实现。
禁止转载,侵权必究!Update 2020.11.21
前言
强化学习作为一个独立的机器学习的分支和我们前面课程介绍的CNN有什么不同呢?
CNN的一般性流程:输入图片–>神经网络–>预测(分类、目标检测)
强化学习一般性流程:初始化游戏–>state1–>action1—>state2(reward1)–>action2–>state3(reward2)–>action3…–>结束
教学环境
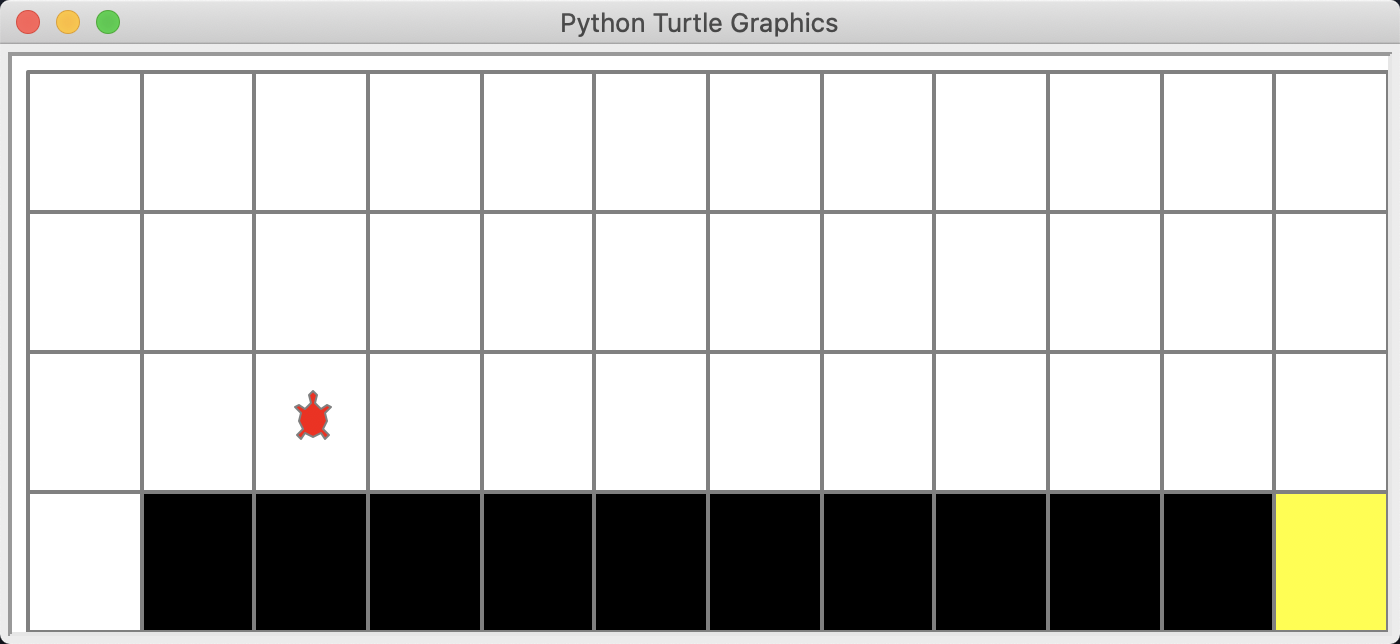
gym是一个开放的强化学习教学环境,比如我们后面要用到的小乌龟找出口和CartPole都可以用gym库来模拟。另外,在真实的强化学习任务中建立仿真环境也非常重要。
SARSA算法
1.Agent
import numpy as np
class SarsaAgent(object):
def __init__(self, obs_n, act_n, learning_rate=0.01, gamma=0.9, e_greed=0.1):
self.act_n = act_n # 动作维度,有几个动作可选
self.lr = learning_rate # 学习率
self.gamma = gamma # reward的衰减率
self.epsilon = e_greed # 按一定概率随机选动作
self.Q = np.zeros((obs_n, act_n))
# 根据输入观察值,采样输出的动作值,带探索
def sample(self, obs):
...
# 根据输入观察值,预测输出的动作值
def predict(self, obs):
Q_list = self.Q[obs, :]
maxQ = np.max(Q_list)
action_list = np.where(Q_list == maxQ)[0] # maxQ可能对应多个action
action = np.random.choice(action_list)
return action
# 学习方法,也就是更新Q-table的方法
def learn(self, obs, action, reward, next_obs, next_action, done):
...
# 保存Q表格数据到文件
def save(self):
npy_file = './q_table.npy'
np.save(npy_file, self.Q)
print(npy_file + ' saved.')
# 从文件中读取Q值到Q表格中
def restore(self, npy_file='./q_table.npy'):
self.Q = np.load(npy_file)
print(npy_file + ' loaded.')
learn方法:
# 学习方法,也就是更新Q-table的方法
# obs就是state的意思
def learn(self, obs, action, reward, next_obs, next_action, done):
""" on-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
next_action: 根据当前Q表格, 针对next_obs会选择的动作, a_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * self.Q[next_obs, next_action] # Sarsa
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正qsample方法:
# 根据输入观察值,采样输出的动作值,带探索
def sample(self, obs):
if np.random.uniform(0, 1) < (1.0 - self.epsilon): #根据table的Q值选动作
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) #有一定概率随机探索选取一个动作
return action2.训练
导入依赖包
import gym
import numpy as np
import time
from sarsa_agent import SarsaAgent
from gridworld import CliffWalkingWapper定义训练方法
def run_episode(env, agent, render=False):
total_steps = 0 # 记录每个episode走了多少step
total_reward = 0
obs = env.reset() # 重置环境, 重新开一局(即开始新的一个episode)
action = agent.sample(obs) # 根据算法选择一个动作
while True:
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
next_action = agent.sample(next_obs) # 根据算法选择一个动作
# 训练 Sarsa 算法
agent.learn(obs, action, reward, next_obs, next_action, done)
action = next_action
obs = next_obs # 存储上一个观察值
total_reward += reward
total_steps += 1 # 计算step数
if render:
env.render() #渲染新的一帧图形
if done:
break
return total_reward, total_steps执行训练
# 使用gym创建悬崖环境
env = gym.make("CliffWalking-v0") # 0 up, 1 right, 2 down, 3 left
env = CliffWalkingWapper(env)
# 创建一个agent实例,输入超参数
agent = SarsaAgent(
obs_n=env.observation_space.n,
act_n=env.action_space.n,
learning_rate=0.1,
gamma=0.9,
e_greed=0.1)
is_render = False
# 训练500个episode,打印每个episode的分数
for episode in range(500):
ep_reward, ep_steps = run_episode(env, agent, is_render)
print('Episode %s: steps = %s , reward = %.1f' % (episode, ep_steps, ep_reward))
if episode % 20 ==0:
is_render = True
else:
is_render = False3.测试
定义测试方法
def test_episode(env, agent):
total_reward = 0
obs = env.reset()
while True:
action = agent.predict(obs) # greedy
next_obs, reward, done, _ = env.step(action)
total_reward += reward
obs = next_obs
time.sleep(0.5)
env.render()
if done:
break
return total_reward执行测试
# 全部训练结束,查看算法效果
test_reward = test_episode(env, agent)
print('test reward = %.1f' % (test_reward))4.查看结果:
Q-Learning算法
1.Agent差别
def learn(self, obs, action, reward, next_obs, next_action, done): # sarsa
def learn(self, obs, action, reward, next_obs, done): # Q-Learninglearn方法差别
target_Q = reward + self.gamma * self.Q[next_obs, next_action] # Sarsa
target_Q = reward + self.gamma * np.max(self.Q[next_obs, :]) # Q-learning 2.训练方法差别
sarsa:
...
action = agent.sample(obs) # 根据算法选择一个动作
while True:
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
next_action = agent.sample(next_obs) # 根据算法选择一个动作
# 训练 Sarsa 算法
agent.learn(obs, action, reward, next_obs, next_action, done)
action = next_action
...注意: 它的next_action需要额外用sample()方法初始化。
Q-Learning:
...
while True:
action = agent.sample(obs) # 根据算法选择一个动作
next_obs, reward, done, _ = env.step(action) # 与环境进行一个交互
# 训练 Q-learning算法
agent.learn(obs, action, reward, next_obs, done)
...4.查看结果:
SARSA和Q-Learning算法比较
- 所有强化学习算法都存在探索与利用的平衡问题,一般采用两个策略模型,一个策略为行为策略,用于保持探索性,提供多样化的数据,优化另一个策略(目标策略)。
- Sarsa是先用sample()函数做出动作后再更新Q,循环往复,依据Q表格的值走,直到走到失败、成功或者到达最大step数。Q-Learning先假设下一步选取Max Reward的动作的Q值去更新Q。然后再用sample()函数选择动作。循环往复,直到走到失败、成功或者到达最大step数。
- sample()函数实现了ε-greedy算法。有一些概率的走法是探索,有一些概率的走法是利用。在利用这种走法下还是走Max Q,也就是顺着之前的经验走(predict()函数)。
- SARSA算法是on-policy的,也就是说他的行为策略和目标策略是一致的,都是sample()。Q-Learning算法是off-policy的,目标策略选Q表格里面的最大值,所以它的目标策略Max Q,行为策略跟SARSA一样,也是sample()函数。
- Q-Learning比SARSA激进,更愿意选择最优解。
- SARSA比Q-Learning收敛更快,训练轮数更少。
- 在程序最后,我们用test_episode()来验证效果。它内部是在调用predict()。是不是巧合呢?不,这不是巧合。因为测试的走法就应该是按经验Q值来走!符合正常的思维逻辑!